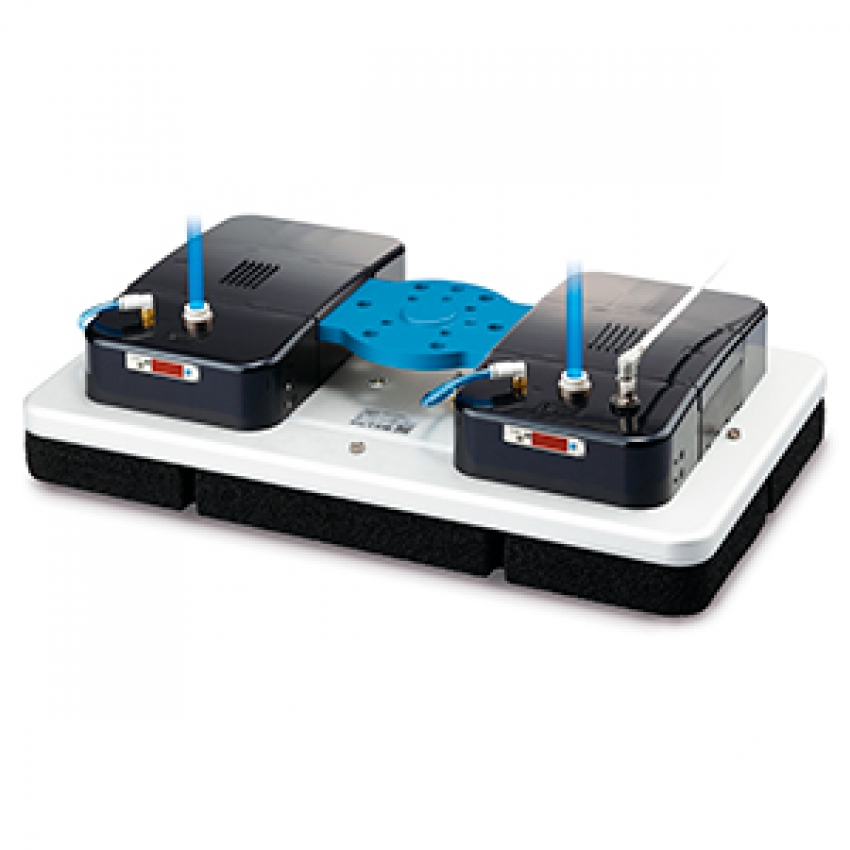
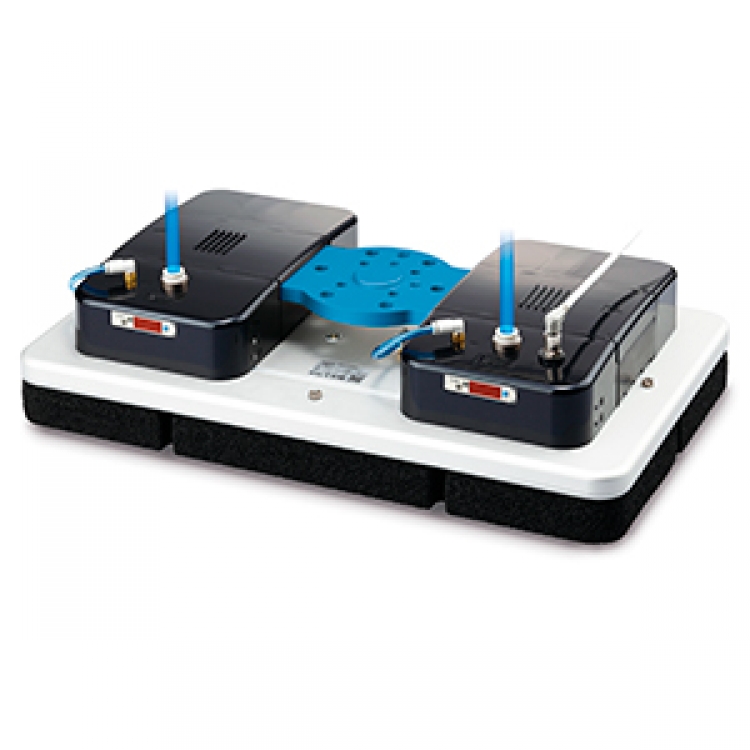
Plano aspirante ZGS/ZGP
Características Plano aspirante ZGS/ZGP
Reduce el tiempo de instalación y diseño – Integración de todos los componentes esenciales en una sola unidad
Permite reducir el tamaño del robot – Diseño delgado y ligero para optimizar las dimensiones del robot
Optimización de la aplicación para obtener la máxima eficacia – Puedes seleccionar el número de eyectores ensamblados en función del caudal de aspiración requerido
Mejora la productividad – Sujeción eficaz de piezas de diferentes formas y tamaños.
Y mucho más
Conjunto de eyector, espuma, válvula de alimentación, válvula de soplado atmosférico y presostato integrados en cada unidad de eyector para un uso inmediato con solo conectar un conector M8 y suministrar aire
Fuerza máx. de agarre: 2144 N; Tamaño de espuma: 400x240; Peso: 3.9 kg
Fuerza máx. de agarre: 880 N; Tamaño de espuma: 300x180; Peso: 1.8 kg
Fuerza máx. de agarre: 440 N; Tamaño de espuma: 200 x 120; Peso: 1.3 kg
Se puede montar en robots industriales y robots colaborativos: Universal Robots, OMRON/TECHMAN, FANUC y Yaskawa
Mantiene el agarre en cualquier orientación, independientemente del área de contacto.
Plano aspirante
La imagen podría no corresponder con la configuración seleccionada
Haz clic en previsualizar 3D para ver exactamente tu selección
Información relacionada
Documentación
Ver en movimiento
Consulta a nuestros especialistas
Cesta de productos

{kind=link}